


















Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.

Shenzhen Kingsom Technology Co., Ltd.
marque: Kingsom
Détails d'emballage: Carton en bois
productivité: 10000sets/day
transport: Ocean,Land
Lieu d'origine: Shenzhen
Soutenir: Strong
Certificats : CE,CCC,ROHS and ISO9001:2008
Hafen: Shenzhen Port
Type de paiement: L/C,T/T
Incoterm: FOB
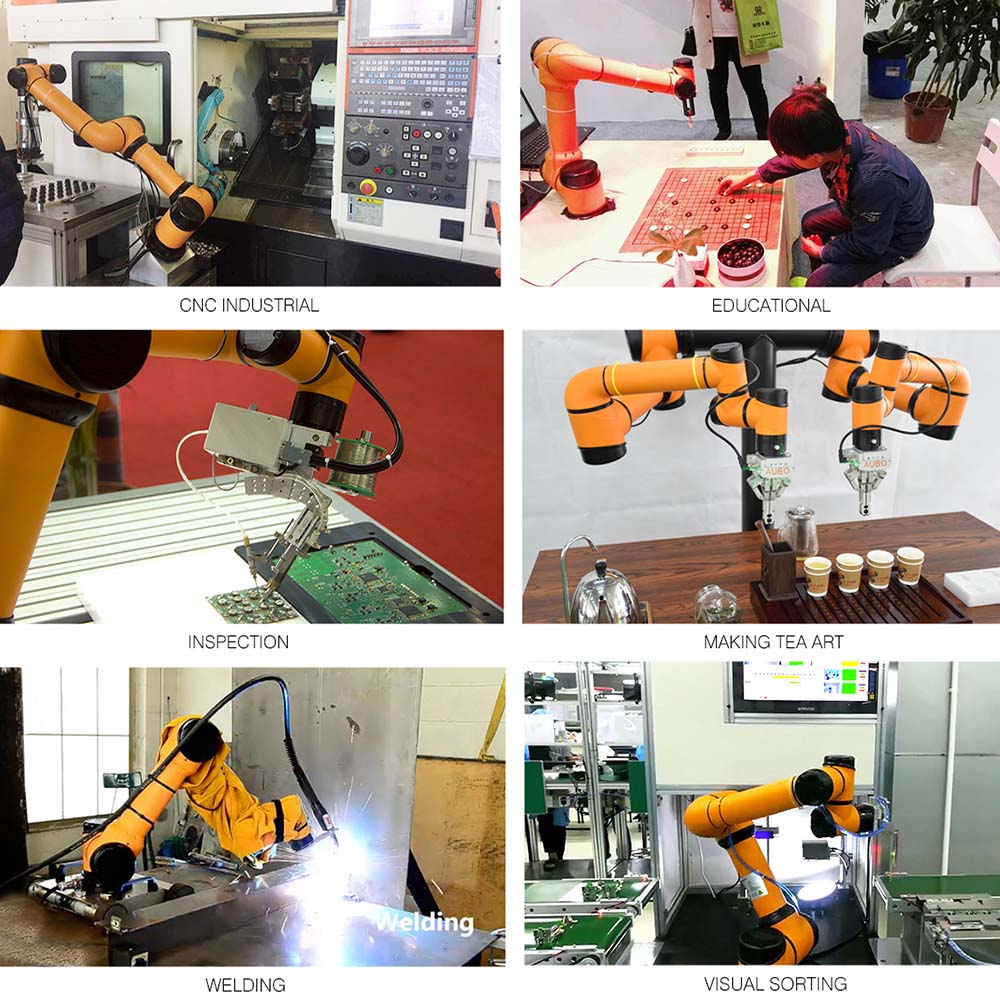
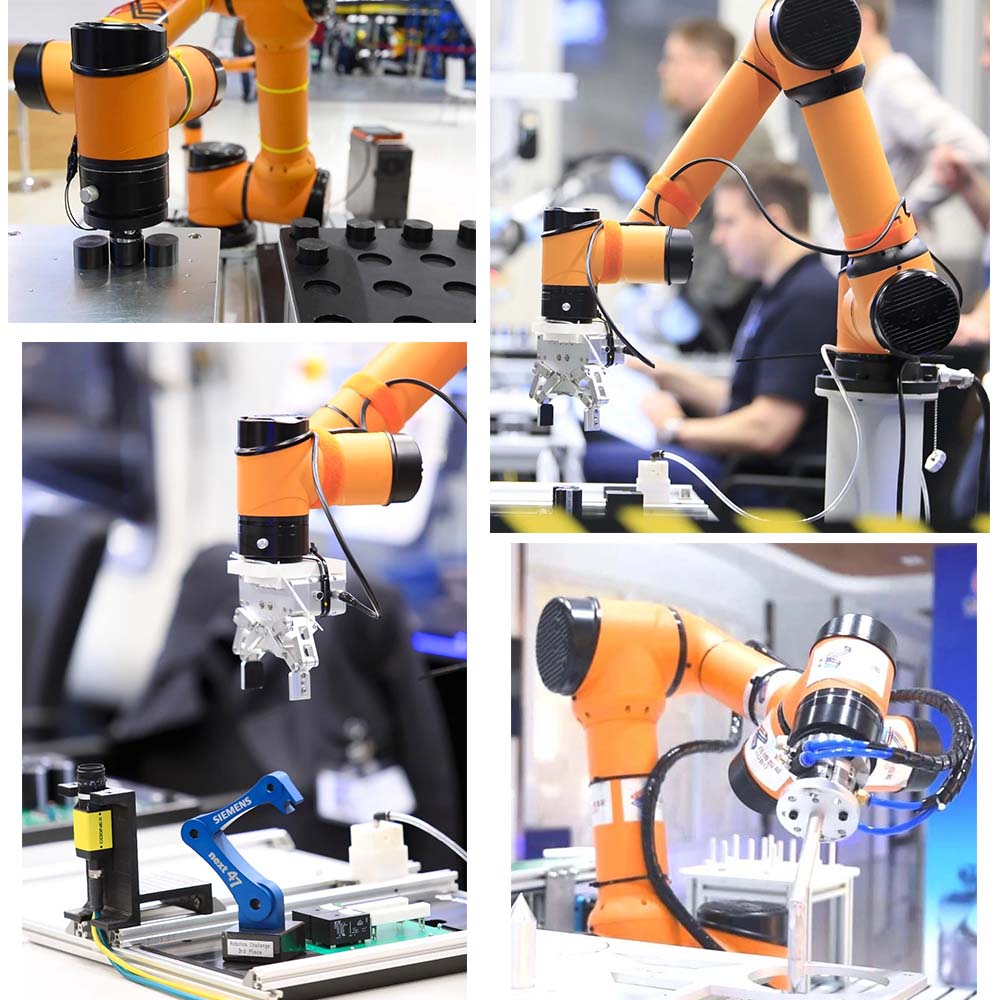
Bras robotique collaboratif de robot de matériel industriel
Le bras de robot est le dispositif mécanique automatisé le plus utilisé dans le domaine technique des robots. Il peut être observé dans les domaines de la fabrication industrielle, des traitements médicaux, des services de divertissement, de l'armée, de la fabrication de semi-conducteurs et de l'exploration spatiale. Bien que leurs formes soient différentes, elles ont toutes une caractéristique commune, c'est-à-dire qu'elles peuvent accepter des instructions et localiser avec précision un point sur un espace tridimensionnel (ou bidimensionnel) pour l'opération. En plus de la machine à bras robotisés, notre société propose également de nombreux produits, tels que l'extracteur de fumées de soudage, le distributeur de pâte à souder, le chargeur de vis pneumatique à main, le chargeur de vis automatique. Si vous avez besoin de ces produits, vous pouvez nous contacter, nous vous répondrons dans les plus brefs délais.
Fonction collaborative
1. Guide pour l'enseignement (planification de mouvement cinématique inverse), cette opération manuelle du robot permet de programmer rapidement et facilement le robot par démonstration sans aucune compétence en programmation.
2. Fonctionne côte à côte avec l'opérateur humain sans barrière de sécurité, laser ou capteurs (après une évaluation des risques préformée).
3. L'apprentissage de l'interface utilisateur pendant la programmation (cinématique avant) permet la programmation et la simulation en ligne via une tablette à écran tactile.
4. Léger, flexible, facile à réutiliser, ce robot pèse moins de 24 kg
Fonctions de sécurité
1. Conçu conformément aux exigences de sécurité PLd et ISO 10218-1 (limitation de puissance et de force 5.10.5) et conforme à la plupart des spécifications pour le fonctionnement collaboratif du robot.
2. La conception de limitation de puissance et de force amène le robot à un arrêt de protection si les limites sont dépassées ou si une collision est détectée. La vitesse et la force peuvent être ajustées pour s'adapter et optimiser facilement n'importe quelle application.
3. Les capteurs intégrés aux entraînements de moteur fournissent une rétroaction en temps réel pour éviter les situations dangereuses.
4. Les boutons d'arrêt d'urgence sont positionnés sur le boîtier d'apprentissage et de commande avec une distance de freinage inférieure à 1 mm.
Architecture Open Source
1. Réseau de bus CAN utilisé dans ce robot pour que plusieurs microcontrôleurs communiquent entre eux.
2. ROS (Robot Operating System) est pris en charge via l'API.
3. Le matériel adopte des protocoles de bus CAN avec des extensions d'interface d'E / S ouvertes.
4. Intégrez facilement le robot dans les systèmes de production existants.
Retour sur investissement (ROI)
1. Le faible coût de possession, aucune compétence en programmation nécessaire et la facilité d'intégration dans un système contribuent à un retour sur investissement rapide, le retour sur investissement moyen est de 3 à 4 mois.
2. Les emplois dans des environnements à court terme et à mélange élevé comme l'automatisation de laboratoire ou l'entretien des machines sont des exemples parfaits d'industries nécessitant un redéploiement rapide.
3. L'espace au sol est un coût élevé dans la plupart des entreprises, généralement plus que l'équipement. Un robot léger et de faible encombrement sera un énorme avantage pour les entreprises de toutes tailles.
4. Réutilisez, redéployez et / ou réinventez des applications avec le même robot, modifiez le nombre de degrés de liberté, les joints et les tubes sont modulaires, ce qui facilite la réparation et la reconfiguration.
Intelligence
1. Les systèmes de vision peuvent être intégrés dans le contrôleur.
2. Système logiciel basé sur la gestion de la plateforme cloud qui assure la maintenance à distance, le diagnostic des pannes et la mise à niveau en ligne du firmware.
3. Cette plate-forme de robot de recherche est largement utilisée dans le monde entier dans les laboratoires de recherche d'entreprise et pour la recherche universitaire en robotique.
Conception modulaire
1. Le robot peut être configuré pour avoir entre quatre et sept degrés de liberté pour répondre aux besoins des utilisateurs.
2. La longueur du joint peut être personnalisée pour des liens plus longs ou plus courts.
Spécifications techniques
| Controlled Axed DoF | 6 axes (J1, J2, J3, J4, J5, J6) J7max |
| Reach | 924 mm |
| Working Range | 880 mm |
| Payload | 5kg |
| Weight | 24kg |
| Footprint | 172 mm diameter |
| Collabortative Operation |
Safety-rated monitored stop, and guiding, speed and separation monitoring, power and force limiting |
| Certifications | ISO 10218-1:2011, EN 60204-1:2006 +A1:2009 |
| ISO 12100:2010, ISO 13849-1:2008, CE | |
| Repeatability | ±0.02mm |
| Linear Velocity | 2.8 m/s adjustable |
| Power Consumption | 200 watts typical application |
| Materials | Aluminum, Steel, Plastic |
| Ambient Humidity | Normal 75% RH or less without frost, or dew, 85% RH short term |
| Ambient Temperature | 0 to 45 degrees Celsius |
| IP Classification of Robot | IP 54 |
| Programing |
Teach Pendant with user interface, guide to teach, ROS compatibility through an API, Lua, Python |
| Communication | CAN Bus |
| Motor Type | Harmonic drive 48 Volt |
| Installation Orientation | Any celling, Floor, Wall |




| Axis | Working Range | MAximun Speed | Max Joint Moments |
| J1 axis rotation base | (+/-)175° | 150°/sec | 207Nm |
| J2 axis rotation shoulder | (+/-)175° | 150°/sec | 207Nm |
| J3 axis rotation elbow | (+/-)175° | 150°/sec | 207Nm |
| J4 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |
| J5 axis wrist swing | (+/-)175° | 180°/sec | 34Nm |
| J6 axis wrist rotation | (+/-)175° | 180°/sec | 34Nm |

| Dimensions (LxWxH) | 683x220x622 mm | I/O Ports | GENERAL I/O | ||
| Weight | 20kg | Digital in | 16 | 16 | |
| Cabling | 5m | Digital Out | 16 | 16 | |
| Colour | Black | Analog in | 4 | ||
| Communication | TCP/IP, Modbus-RTU/TCP | ||||
| Power supply | 100-240 VAC, 50-60Hz | ||||
| IP Classification | IP54 |
| I/O PORTS | GENERAL I/O | SAFETY I/O |
| Digital in | 16 | 16 |
| Digital Out | 16 | 16 |
| Analog in | 4 |


Nos services
1. Votre demande concernant nos produits ou prix sera répondue dans les 24 heures.
2. Personnel bien formé et expérimenté pour répondre à toutes vos demandes en anglais courant
3. OEM et ODM
4. Boîte de papier de bonne qualité et emballage de carton
5. Vérifiez avant l'expédition
6. Méthode d'expédition en toute sécurité, telle que DHL / EMS / FEDEX / TNT / UPS
7. Service de fret maritime ou transitaire
8. La commande d'échantillon en petite quantité est acceptable
Groupes de Produits : Machine de bras de robot > Machine de peinture robotique intelligente à 6 axes de Kingsom












Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.